我们非常重视您的个人隐私,当您访问我们的网站时,请同意使用的所有cookie。有关个人数据处理的更多信息可访问《隐私政策》


2017/01/03
磁传感器是传感器中应用最为广泛的门类之一,应用领域非常广泛。与温度、压力或者流量等直接测量物理属性参数变化不同,磁传感器一般不是直接测量相关物理属性,而是检测变化,或者由物体或事件引起的磁场干扰。因此,磁场可能带有与方向、存在状态、选装、角度或电流等属性相关的信息,而这些信息将由磁传感器转换为电压。少数磁传感器是完全测量磁场,例如指南针中测量地磁场。输出信号需经过一些信号处理以转换为所需参数。显然,磁场分布取决于产生或干扰磁场的物体(即磁体、电流等)或事件的距离和形式。因此在应用设计中,应始终考虑传感器和产生磁场的物体这两方面的因素,这一点非常重要。尽管磁传感器的使用难度更大,但却能提供精确、可靠的数据,而且无需使用物理端子。
磁阻传感器的主要特性
磁传感器广泛用于现代工业和电子产品中以感应磁场强度来测量电流、位置、方向等物理参数。在现有技术中,有许多不同类型的传感器用于测量磁场和其他参数,例如采用霍尔(Hall)元件,各向异性磁电阻(Anisotropic Magnetoresistance, AMR)元件或巨磁电阻(Giant Magnetoresistance, GMR)元件为敏感元件的磁传感器。
以霍尔元件为敏感元件的磁传感器通常使用聚磁环结构来放大磁场,提高霍尔输出灵敏度,从而增加了传感器的体积和重量,同时霍尔元件具有功耗大,线性度差的缺陷。AMR元件虽然其灵敏度比霍尔元件高很多,但是其线性范围窄,同时以AMR为敏感元件的磁传感器需要设置Set/Reset线圈对其进行预设/复位操作,造成其制造工艺的复杂,线圈结构的设置在增加尺寸的同时也增加了功耗。以GMR元件为敏感元件的磁传感器较之霍尔电流传感器有更高的灵敏度,但是其线性范围偏低。
TMR(Tunnel Magneto Resistance)元件是近年来开始工业应用的新型磁电阻效应传感器,其利用的是磁性多层膜材料的隧道磁电阻效应对磁场进行感应,比之前所发现并实际应用的AMR元件和GMR元件具有更大的电阻变化率。我们通常也用磁隧道结(Magnetic Tunnel Junction,MTJ)来代指TMR元件,MTJ元件相对于霍尔元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更好的线性度,不需要额外的聚磁环结构;相对于AMR元件具有更好的温度稳定性,更高的灵敏度,更宽的线性范围,不需要额外的set/reset线圈结构;相对于GMR元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更宽的线性范围。下图是四代磁传感技术原理图。
下表是霍尔元件、AMR元件、GMR元件以及TMR元件的技术参数对比,可以更清楚直观的看到各种技术的优劣。
技术 | 功耗(mA) | 尺寸(mm) | 灵敏度 (mV/V/Oe) | 工作范围 (Oe) | 分辨率 (mOe) | 温度特性 (℃) |
Hall | 5~20 | 1×1 | 0.05 | 1~1000 | 500 | <150 |
AMR | 1~10 | 1×1 | 1 | 0.001~10 | 0.1 | <150 |
GMR | 1~10 | 2×2 | 3 | 0.1~30 | 2 | <150 |
TMR | 0.001~0.01 | 0.5×0.5 | 20 | 0.001~200 | 0.1 | <200 |
TMR主要特性
下图是一个MTJ元件的结构原理图。MTJ元件由钉扎层(Pinning Layer)、隧道势垒层(Tunnel Barrier)、自由层(Free Layer)构成。钉扎层由铁磁层(被钉扎层,Pinned Layer)和反铁磁层(AFM Layer)构成,铁磁层和反铁磁层之间的交换耦合作用决定了铁磁层的磁矩方向;隧道势垒层通常由MgO或Al2O3构成,位于铁磁层的上部。铁磁层位于隧道势垒层的上部。如图所示的箭头分别代表被钉扎层和自由层的磁矩方向。被钉扎层的磁矩在一定大小的磁场作用下是相对固定的,自由层的磁矩相对于被钉扎层的磁矩是相对自由且可旋转的,随外场的变化而发生翻转。各薄膜层的典型厚度为0.1 nm到100 nm之间。
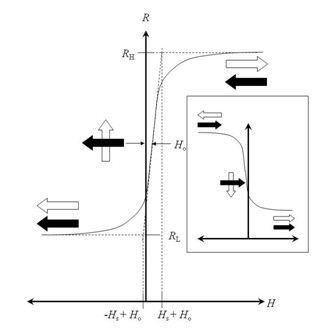
底电极层(Bottom Conducting Layer)和顶电极层(Top Conducting Layer)直接与相关的反铁磁层和自由层电接触。电极层通常采用非磁性导电材料,能够携带电流输入欧姆计,欧姆计适用于已知的穿过整个隧道结的电流,并对电流(或电压)进行测量。通常情况下,隧道势垒层提供了器件的大多数电阻,约为1000欧姆,而所有导体的阻值约为10欧姆。底电极层位于绝缘基片(Insulating Layer)上方,绝缘基片要比底电极层要宽,且位于其他材料构成的底基片(Body Substrate)的上方。底基片的材料通常是硅、石英、耐热玻璃、GaAs、AlTiC或者是能够于晶圆集成的任何其他材料。硅由于其易于加工为集成电路(尽管磁性传感器不总是需要这种电路)成为最好的选择。 下图所示的是在理想情况下的MTJ元件的响应曲线。在理想状态下,磁电阻R随外场H的变化是完美的线性关系,同时没有磁滞(在实际情况下,磁电阻的响应曲线随外场变化具有滞后的现象,我们称之为磁滞。磁电阻的响应曲线为一个回路,通常作为应用的磁电阻材料的磁滞很小,在实际使用中可以看做一个完美的线性曲线)。在现实应用的传感器领域,由于磁传感设计的制约以及材料的缺陷,这条曲线会更弯曲。本发明涉及了传感器的设计、结构以及能够生产实施的工序,该传感器具有卓越的工作感应,在工作区域内同时具有高线性度、低磁滞、高灵敏度的特点(即磁电阻响应曲线斜率大)。
R-H曲线具有低阻态RL和高阻态RH。其高灵敏度的区域是在零场附近,传感器的工作区间位于零场附近,约为饱和场之间1/3的区域。响应曲线的斜率和传感器的灵敏度成正比。如图3所示,零场切线和低场切线以及高场切线相交于点(-Hs+Ho)和点(Hs+Ho),可以看出,响应曲线不是沿H = 0的点对称的。Ho是典型的偏移场。Ho值通常被称为“橘子皮效应(Orange-peel Coupling)”或“奈尔耦合(Néel Coupling)”,其典型值为1到40 Oe。其与磁电阻元件中铁磁性薄膜的结构和平整度有关,依赖于材料和制造工艺。Hs被定量地定义为线性区域的切线与正负饱和曲线的切线的交点对应的值,该值是在响应曲线相对于Ho点的不对称性消除的情况下所取的。图3中,白色箭头代表自由层磁矩方向,黑色箭头代表钉扎层磁矩方向,磁电阻响应曲线随自由层磁矩和被钉扎层磁矩之间角度的变化而变化:当自由层磁矩与钉扎层磁矩反平行时,曲线对应高阻态RH;当自由层磁矩与钉扎层磁矩平行时,曲线对应低阻态RL;当自由层磁矩与钉扎层磁矩垂直时,阻值是位于RL和RH之间的中间值,该区域是理想的线性磁传感器的“工作点”。 上图中的内插图是另一个磁电阻R与外场H的响应曲线图,该磁电阻沿传感器的法线旋转了180°。在同一外场H的作用下,该磁电阻的响应曲线与主图对应的磁电阻的响应曲线呈相反的变化趋势。主图对应的磁电阻和旋转180°设置的磁电阻可以构造电桥,这被证明比其他可能的方法输出值更大。 电桥可以用来改变磁电阻传感器的信号,使其输出电压便于被放大。这可以改变信号的噪声,取消共模信号,减少温漂或其他的不足。MTJ元件可以连接构成惠斯通电桥或其他电桥。
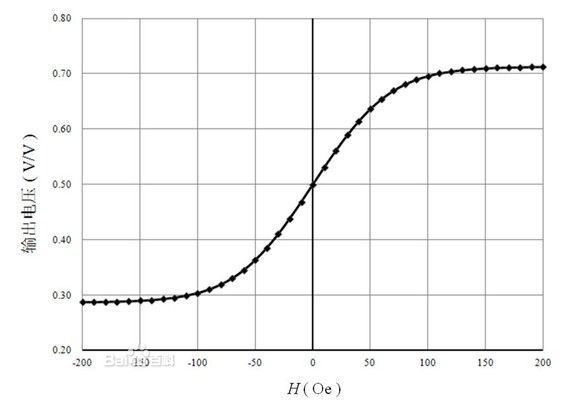
上图是一个典型的MTJ推挽半桥传感器结构。沿传感器的法线旋转180°排列的两个MTJ磁电阻构成了半桥结构,其具有3个外接焊盘(Contact-Pad),依次为:偏置电压(Vbias)、中心点VOUT以及接地点(GND),桥式电路可通过焊盘进行电连,稳恒电压Vbias施加于焊盘Vbias端和GND端。在同一外场H的作用下,一个磁电阻的阻值增加的同时另一个的阻值会随之降低,施加相反方向的外场会使一个磁电阻的阻值降低的同时另一个的阻值会随之增加,使两个磁电阻测量外场有相反的响应——一个阻值增加另一个阻值降低——这可以增加传感器的灵敏度,因此被称为“推挽式”桥式电路。 推挽半桥传感器的输出电压可以通过很多已知的方法进行测量,例如在V1和GND焊盘之间连接电压表,V1和GND之间的电位差(V1-GND)就是输出电压,其典型的输出曲线的模拟结果如图4所示。
上图是MTJ电桥的输出曲线为模拟信号,可以通过使用NSA5311对模拟信号进行处理,实现输出信号的线性化处理,可根据用途输出数字信号。 巨磁电阻效应的发现者法国科学家阿尔贝·费尔(Albert Fert)和德国科学家彼得·格林贝格尔(Peter Andreas Grünberg)由于其对现代磁记录和工业领域的巨大贡献而获得2007年诺贝尔物理学奖,作为GMR元件的下一代技术,TMR(MTJ)元件已完全取代GMR元件,被广泛应用于硬盘磁头领域。相信TMR磁传感技术将在工业、生物传感、磁性随机存储(Magnetic Random Access Memory,MRAM)等领域有极大的发展与贡献。 相关附件 |

您好,感谢您的咨询。
请提供以下信息,我们会尽快安排相关人员与您对接,谢谢。